Tehnologia robotică medicală traversează o perioadă de transformare fundamentală, iar NVIDIA Isaac for Healthcare se poziționează în avangarda acestei revoluții. Publicat la data de 29 octombrie 2025, acest ghid detaliat oferă o perspectivă tehnică profundă asupra modului în care dezvoltatorii pot trece de la conceptul de simulare la implementarea fizică a roboților chirurgicali autonomi. Articolul explorează fluxul de lucru SO-ARM Starter, o metodologie inovatoare care democratizează accesul la robotică medicală de înaltă precizie, reducând barierele tehnice și financiare care au limitat istoric acest domeniu.
Introducere: Puntea dintre Lumea Virtuală și Realitatea Chirurgicală
Simularea a fost dintotdeauna o componentă critică în imagistica medicală, utilizată pentru a acoperi golurile de date și pentru a testa scenarii complexe fără riscuri pentru pacienți. Cu toate acestea, în domeniul roboticii sanitare, utilizarea simulărilor a fost adesea împiedicată de limitări semnificative: latența mare, silozurile de date care nu comunicau între ele și, poate cea mai mare problemă, dificultatea de a traduce succesele virtuale în sisteme fizice funcționale. NVIDIA Isaac for Healthcare răspunde acestor provocări printr-un cadru de dezvoltare integrat care unifică colectarea datelor, antrenarea modelelor și evaluarea performanțelor, atât în medii simulate, cât și pe hardware real.
Lansarea versiunii 0.4 aduce în prim-plan un flux de lucru "end-to-end" bazat pe SO-ARM, oferind dezvoltatorilor un punct de plecare solid. Acest lucru permite validarea rapidă a algoritmilor autonomi pe echipamente fizice, accelerând ciclul de inovație. Într-un domeniu unde riscul este inacceptabil, capacitatea de a testa și rafina abilitățile asistențiale într-un mediu sigur și repetabil, înainte de a intra în sala de operație, este inestimabilă.
Fluxul de Lucru SO-ARM: Construirea unui Asistent Chirurgical Încorporat
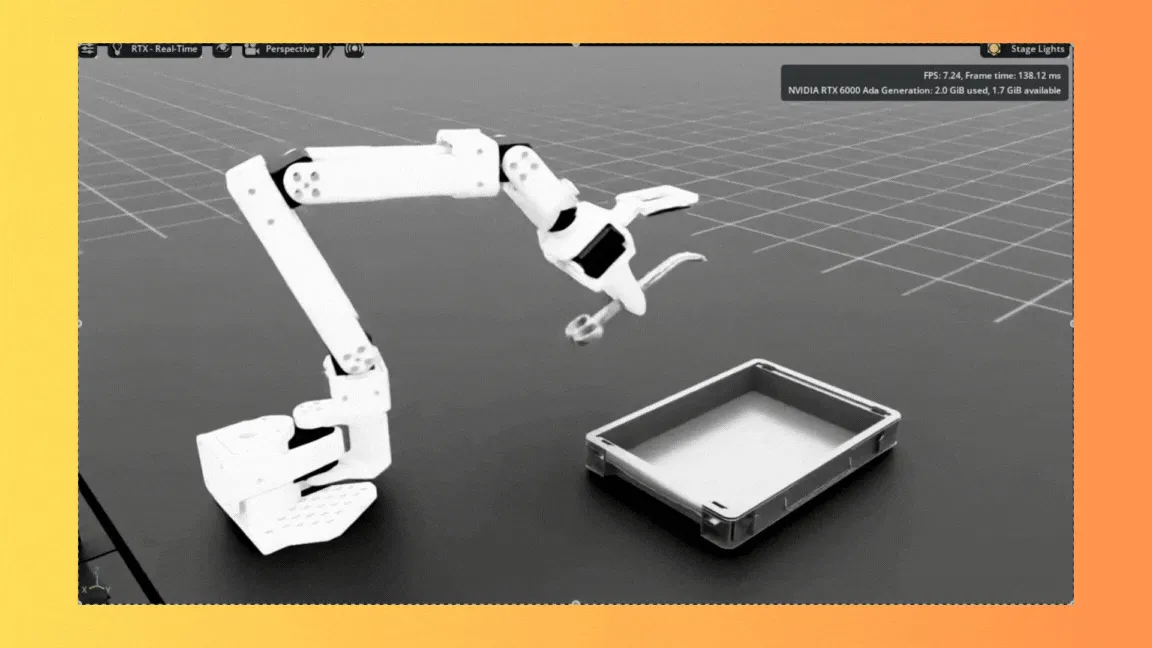
Fluxul de lucru SO-ARM Starter reprezintă o schimbare de paradigmă în modul în care sunt concepute sarcinile de asistență chirurgicală. Acesta oferă dezvoltatorilor un pipeline complet, de la simulare la antrenare și implementare, permițând crearea unui asistent chirurgical autonom într-un timp record. Metodologia se bazează pe o abordare pe trei etape care integrează strâns lumea virtuală cu cea reală, asigurând că roboții nu doar "par" să funcționeze în simulare, ci sunt capabili să performeze în condiții reale, imprevizibile.
Un aspect remarcabil al acestei implementări este faptul că peste 93% din datele utilizate pentru antrenarea politicilor (policiilor) de decizie au fost generate sintetic în simulare. Această statistică subliniază puterea simulării de a acoperi deficitul masiv de date din robotică, o problemă cronică în industrie. Colectarea datelor în lumea reală este costisitoare, lentă și limitată de factori logistici și de siguranță, în timp ce simularea permite generarea unor volume masive de date diverse, acoperind cazuri marginale (edge cases) care ar fi periculoase sau imposibil de reprodus în realitate.
Abordarea Mixtă Sim2Real: Antrenament Hibrid pentru Robustete
Pentru a depăși limitările inerente ale fiecărui mediu luat separat, fluxul de lucru propune o abordare de antrenament mixt Sim2Real (De la Simulare la Realitate). Această metodologie combină datele simulate cu cele din lumea reală pentru a crea politici de control care generalizează optim. Provocarea fundamentală este binecunoscută: antrenarea roboților exclusiv în lumea reală este prohibitiv de scumpă și limitată ca diversitate, în timp ce antrenarea exclusivă în simulare eșuează adesea în a captura complexitățile fizicii reale (frecare, zgomot de senzor, variații de iluminare).
Soluția implementată utilizează aproximativ 70 de episoade simulate pentru a acoperi scenarii diverse și variații de mediu, combinate cu 10-20 de episoade din lumea reală pentru autenticitate și ancorare în realitate. Această rețetă hibridă creează modele care sunt capabile să navigheze în lumea reală, păstrând totodată robustețea oferită de volumele mari de date sintetice. Este important de menționat că întregul ciclu de simulare, antrenare și implementare poate fi executat pe o singură stație DGX Spark, democratizând accesul la resursele de calcul necesare pentru Inteligența Artificială fizică.
Implementare Tehnică: Colectare, Antrenare și Evaluare
Pe plan tehnic, procesul este extrem de granular. Pentru colectarea datelor în lumea reală cu hardware-ul SO-ARM101, dezvoltatorii pot utiliza scripturi Python specifice care controlează roboții "follower" și "leader" pentru teleoperare. Sistemele de camere multiple (de exemplu, cameră de încheietură și cameră de sală) capture date vizuale esențiale, în timp ce stările robotului și acțiunile sunt înregistrate pentru antrenament.
Pentru cei care nu dețin hardware fizic, simularea oferă alternative viabile prin teleoperare bazată pe tastatură sau prin utilizarea unui braț "leader" virtual. Această flexibilitate permite cercetătorilor să experimenteze fără investiții inițiale majore. După colectarea datelor, acestea sunt convertite în formatul LeRobot și combinate pentru antrenament.
Pipeline-ul de antrenare permite ajustarea fină (fine-tuning) a modelului GR00T N1.5, un model fundamental pre-antrenat, pe setul de date mixt. Modelul rezultat este capabil să proceseze instrucțiuni în limbaj natural, cum ar fi "Pregătește scalpelul pentru chirurg" sau "Dă-mi penseta", și să execute acțiunile robotice corespunzătoare. Integrarea profundă cu framework-ul de învățare prin întărire (RL) din Isaac Lab permite antrenarea în medii paralele (mii de simulări simultane), analiza traiectoriilor și validarea statistică.
Optimizare și Implementare: De la Experiment la Producție
Ultimul pas critic este conversia modelelor în format TensorRT pentru implementare. Această etapă optimizează automat modelele pentru producție, suportând forme dinamice și inferență multi-cameră, și oferă instrumente de benchmarking pentru a verifica performanța în timp real. Acest lucru reduce drastic timpul dintre experiment și implementare, transformând Sim2Real dintr-un concept academic într-o parte practică a dezvoltării zilnice.
Concluzie și Perspective Etice
Deși progresele tehnologice sunt impresionante, trecerea la utilizarea în sala de operație ridică întrebări profunde despre etica designului și conformitate. Așa cum subliniază experții, roboții trebuie să învețe nu doar să execute sarcini, ci să înțeleagă ritmul și intuiția chirurgului. Medicii apreciază echipele umane pentru capacitatea de a anticipa nevoile, o subtilitate pe care inteligența artificială trebuie să o învețe. Cu toate acestea, NVIDIA Isaac for Healthcare deschide calea către un viitor în care asistenții robotici pot salva vieți, redugând erorile și sporind eficiența în spitale.
Construirea unui Robot Medical: De la Simulare la Implementare cu NVIDIA Isaac