Inovația în domeniul robotică medicală a făcut un pas revoluționar odată cu introducerea platformelor avansate de simulare și a conceptului de gemeni digitali. Într-o eră în care precizia și siguranța sunt vitale, capacitatea de a testa și valida fluxurile de lucru robotice în medii virtuale înainte de a atinge sala de operație reprezintă un avantaj competitiv major. Acest ghid detaliat explorează noul cadru de lucru NVIDIA Isaac for Healthcare, o soluție care promite să reducă timpul de prototipare de la luni la zile, îmbunătățind simultan acuratețea modelelor și permițând o inovație mai rapidă și mai sigură.
Revoluția simulării în robotică medicală
Istoric, simularea a fost o piatră de temelie în imagistica medicală, ajutând la depășirea problemelor legate de lipsa datelor. Cu toate acestea, în domeniul robotică sanitară, utilizarea simulărilor a fost adesea împiedicată de limitări tehnice: procese prea lente, sisteme izolate („siloed”) și dificultăți majore în translatarea rezultatelor virtuale în sisteme reale funcționale. Peisajul tehnologic se schimbă radical grație avansurilor din domeniul simulării accelerate pe GPU. Dezvoltatorii pot acum să proiecteze, testeze și valideze fluxuri de lucru robotice complet în medii virtuale.
NVIDIA a lansat Isaac for Healthcare ca un răspuns direct la aceste provocări. Acest cadru de dezvoltare pentru robotică medicală bazată pe inteligență artificială oferă dezvoltatorilor instrumente integrate pentru colectarea datelor, antrenarea modelelor și evaluarea performanței, funcționalități care operează fluent atât în simulare, cât și pe hardware real. Versiunea 0.4 aduce în prim-plan un flux de lucru starter bazat pe SO-ARM, menit să democratizeze accesul la tehnologii de vârf pentru dezvoltatorii din domeniul MedTech.
Fluxul de lucru SO-ARM: Construirea unui asistent chirurgical autonom
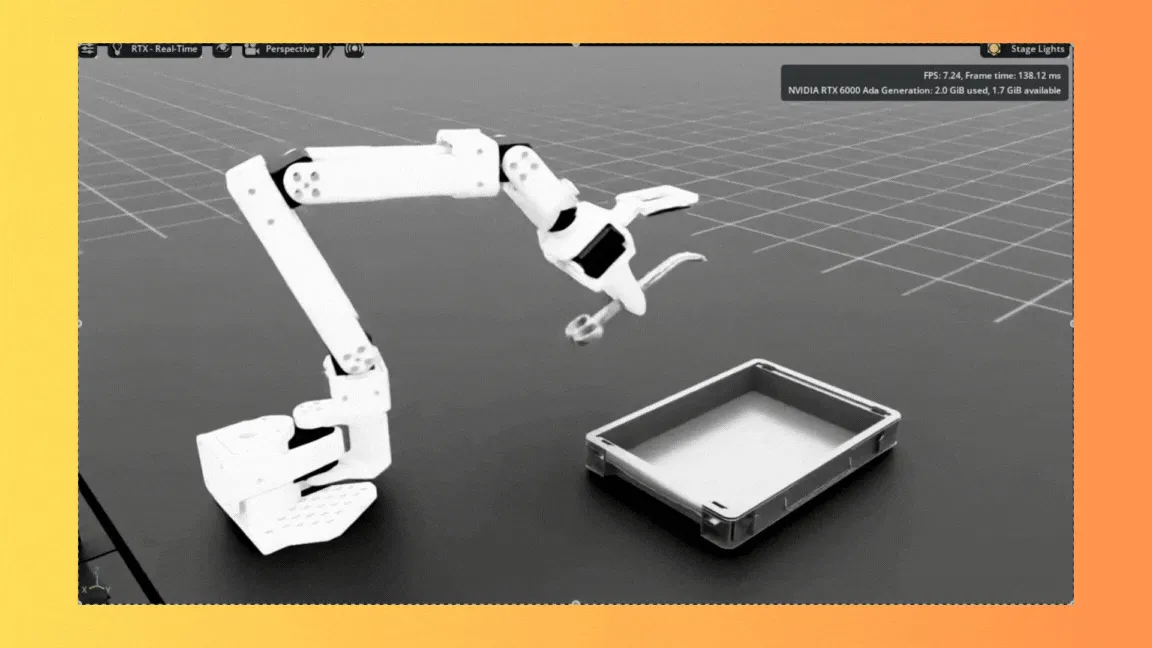
Fluxul de lucru SO-ARM Starter Workflow reprezintă o metodologie nouă și accesibilă pentru explorarea sarcinilor de asistență chirurgicală. Acesta oferă o pipeline completă, de la simulare la antrenare și implementare, permițând dezvoltatorilor să construiască și să valideze sisteme autonome pe hardware real într-un timp record. Principalul avantaj constă în crearea unui mediu sigur și repetabil pentru antrenarea și rafinarea abilităților asistive, eliminând riscurile asociate testării directe în sala de operație.
Implementarea tehnică urmează o pipeline în trei etape care integrează armonios simularea și hardware-ul real. Un aspect remarcabil este că peste 93% din datele utilizate pentru antrenarea politicilor (policies) au fost generate sintetic în simulare. Această statistică subliniază puterea simulării de a acoperi deficitul critic de date din robotică, o problemă care a încetinit istoric progresul în acest domeniu.
Abordarea de antrenare mixtă Sim-to-Real
Una dintre cele mai mari provocări în robotică este „prăpastia realității” (reality gap). Antrenarea roboților exclusiv în lumea reală este costisitoare, lentă și limitată de scenariile fizice disponibile. Pe de altă parte, antrenarea doar în simulare poate eșua în capturarea complexităților nuanțate ale lumii reale, cum ar fi zgomotul senzorilor sau variațiile de iluminare.
Isaac for Healthcare abordează această problemă printr-o metodă de antrenare mixtă. Fluxul de lucru combină aproximativ 70 de episoade de simulare, care oferă scenarii diverse și variații de mediu, cu 10-20 de episoade din lumea reală, care asigură autenticitatea și ancorarea în realitate. Această combinație creează politici de acțiune care generalizează mult mai bine decât cele antrenate pe un singur domeniu. Pentru eficiență maximă, dezvoltatorii pot rula simularea, antrenarea și implementarea pe un singur sistem DGX Spark, demonstrând capacitatea de procesare a inteligenței artificiale fizice (Physical AI).
Implementarea tehnică detaliată: Colectarea datelor și controlul
Pentru colectarea datelor din lumea reală, sistemul suportă hardware-ul SO-ARM101 și alte versiuni integrate în ecosistemul LeRobot. Procesul implică utilizarea a două brațe robotice: unul „follower” (urmăritor) care execută sarcina și unul „leader” (lider) care este controlat de operatorul uman prin teleoperare. Această configurație permite capturarea mișcărilor fine necesare în procedurile chirurgicale.
Comenzile specifice permit configurarea precisă a camerelor (de exemplu, cameră de încheietură și cameră de încăpere), definirea porturilor seriale și setarea parametrilor pentru dataset. De exemplu, se pot înregistra episoade pentru sarcini specifice precum „Pregătește și înmânează instrumentele chirurgicale chirurgului”.
Pentru utilizatorii care nu dețin hardware-ul fizic SO-ARM101, fluxul de lucru oferă o soluție alternativă ingenioasă: teleoperarea bazată pe tastatură. Aceasta permite simularea controlului articulațiilor robotului direct din mediul virtual, facilitând dezvoltarea și testarea algoritmilor fără investiții hardware inițiale.
Pipeline de antrenare a modelelor: De la date la acțiune
După colectarea datelor din ambele surse (simulare și realitate), acestea trebuie convertite și combinate. Procesul implică transformarea datelor de simulare din formatul HDF5 în formatul specific LeRobot, urmată de antrenarea modelului de fundație GR00T N1.5 pe datasetul mixt.
Modelele rezultate sunt capabile să proceseze instrucțiuni în limbaj natural, o funcționalitate revoluționară. De exemplu, un chirurg ar putea spune „Pregătește scalpelul” sau „Dă-mi penseta”, iar robotul, prin intermediul modelului antrenat, va executa acțiunile corespunzătoare. Integrarea nativă cu cea mai recentă versiune LeRobot (v0.4.0) simplifică drastic procesul de post-antrenare a modelului GR00T N1.5.
Pipeline end-to-end: Colectare – Antrenare – Evaluare
Puterea simulării este maximizată atunci când face parte dintr-o buclă iterativă continuă. Isaac Lab susține această viziune printr-o pipeline completă:
1. Generarea de date sintetice: Permite teleoperarea roboților folosind controlere hardware sau tastatură, capturând observații multi-cameră, stările robotului și acțiunile. Această metodă facilitează crearea de dataseturi diverse care includ cazuri limită (edge cases) imposibil de colectat în siguranță în mediul real.
2. Antrenarea și evaluarea politicilor: Integrarea profundă cu cadrul de învățare prin întărire (Reinforcement Learning - RL) din Isaac Lab permite antrenarea PPO (Proximal Policy Optimization). Sistemul poate rula mii de medii de simulare în paralel, accelerând exponențial procesul de învățare. Include, de asemenea, analiza traiectoriilor și metrici de succes pentru validarea statistică în scenarii variate.
3. Conversia modelelor în TensorRT: Pentru implementarea în producție, modelele sunt optimizate automat folosind TensorRT. Acest pas asigură suport pentru forme dinamice și inferență multi-cameră, oferind instrumente de benchmarking pentru a verifica performanța în timp real.
Această abordare reduce semnificativ timpul necesar de la experiment la implementare, transformând conceptul de „sim-to-real” dintr-o provocare academică într-o componentă practică a dezvoltării zilnice.
Concluzie și resurse
Fluxul de lucru SO-ARM Starter din Isaac for Healthcare este disponibil acum, marcând un moment important pentru dezvoltatorii de robotică medicală. Resursele puse la dispoziție includ depozite GitHub cu implementări complete, documentație detaliată pentru configurare și utilizare, modele pre-antrenate GR00T și ghiduri hardware pentru configurația SO-ARM101. Această suită de instrumente nu doar că accelerează dezvoltarea, dar și stabilește un nou standard pentru siguranța și eficiența în crearea asistenților chirurgicali autonomi.
Ghid complet de dezvoltare a roboților medicali: De la simulare la implementare cu NVIDIA Isaac for Healthcare